FreeRTOS learning
Framework
Including: task、communication(queue)、hardware whisperer(port) task.c、port.c、queue.c
Ranging from single CPU to highly functional multicore beast with TCP/IP,filse system and USB. FreeRTOS can be configed in the FreeRTOSConfig.h, for example:
#define configMAX_PRIORITIES ( ( unsigned portBASE_ TYPE ) 5 )
#define configCPU_CLOCK_HZ ( 12000000UL )
#define configTICK_RATE_HZ ( ( portTickType ) 1000 )
#define configMINIMAL_STACK_SIZE ( ( unsigned short ) 100 )
#define configTOTAL_HEAP_SIZE ( ( size_t ) ( 4 * 1024 ) )
Hard ware configuration
In FreeRTOS/Source/portable/IAR(tool name)/ARM_CM3(target chip)/
In portmacro.h defines
#define portENTER_CRITICAL() vPortEnterCritical()
and defines
#define portBASE_TYPE long // Basic integer variable type
#define portSTACK_TYPE unsigned long // Pointers to memory locations
typedef unsigned portLONG portTickType; // The system timer tick type
In port.c
implementation:
vPortEnterCritical()
{
...
}
Task Scheduling
Task control block
Task control block is the basic unit of Task, it describes the main attributes of one Task.
typedef struct tskTaskControlBlock
{
volatile portSTACK_TYPE *pxTopOfStack; /* Points to the location of
the last item placed on
the tasks stack. THIS
MUST BE THE FIRST MEMBER
OF THE STRUCT. */
xListItem xGenericListItem; /* List item used to place
the TCB in ready and
blocked queues. */
xListItem xEventListItem; /* List item used to place
the TCB in event lists.*/
unsigned portBASE_TYPE uxPriority; /* The priority of the task
where 0 is the lowest
priority. */
portSTACK_TYPE *pxStack; /* Points to the start of
the stack. */
signed char pcTaskName[ configMAX_TASK_NAME_LEN ]; /* Descriptive name given
to the task when created.
Facilitates debugging
only. */
#if ( portSTACK_GROWTH > 0 )
portSTACK_TYPE *pxEndOfStack; /* Used for stack overflow
checking on architectures
where the stack grows up
from low memory. */
#endif
#if ( configUSE_MUTEXES == 1 )
unsigned portBASE_TYPE uxBasePriority; /* The priority last
assigned to the task -
used by the priority
inheritance mechanism. */
#endif
} tskTCB;
- pxTopOfStack:top address of task stack
- pxStack:start address of task stack
- uxPriority&uxBasePriority: priority index
- xGenericListItem & xEventListItem: smarter the pointer when operated among lists.
Task is created by using xTaskCreate() function, the basic Task attributes are stored in the newly allocated TCB(memory), and a stack is created to store the task switch register value.
here is ARM Cortex-M0:
ARM Cortex-M0:
StackType_t *pxPortInitialiseStack( StackType_t *pxTopOfStack, TaskFunction_t pxCode, void *pvParameters )
{
/* Simulate the stack frame as it would be created by a context switch
interrupt. */
pxTopOfStack--; /* Offset added to account for the way the MCU uses the stack on entry/exit of interrupts. */
*pxTopOfStack = portINITIAL_XPSR; /* xPSR */
pxTopOfStack--;
*pxTopOfStack = ( StackType_t ) pxCode; /* PC */
pxTopOfStack--;
*pxTopOfStack = ( StackType_t ) prvTaskExitError; /* LR */
pxTopOfStack -= 5; /* R12, R3, R2 and R1. */
*pxTopOfStack = ( StackType_t ) pvParameters; /* R0 */
pxTopOfStack -= 8; /* R11..R4. */
return pxTopOfStack;
}
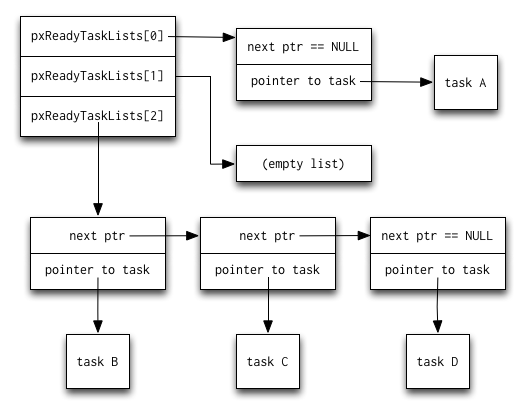
List
Meanwhile, the TCBs are organized as List,including Ready,Pending,Delayed List
/* Lists for ready and blocked tasks. --------------------*/
PRIVILEGED_DATA static List_t pxReadyTasksLists[ configMAX_PRIORITIES ];/*< Prioritised ready tasks. */
PRIVILEGED_DATA static List_t xDelayedTaskList1; /*< Delayed tasks. */
PRIVILEGED_DATA static List_t xDelayedTaskList2; /*< Delayed tasks (two lists are used - one for delays that have overflowed the current tick count. */
PRIVILEGED_DATA static List_t * volatile pxDelayedTaskList; /*< Points to the delayed task list currently being used. */
PRIVILEGED_DATA static List_t * volatile pxOverflowDelayedTaskList; /*< Points to the delayed task list currently being used to hold tasks that have overflowed the current tick count. */
PRIVILEGED_DATA static List_t xPendingReadyList; /*< Tasks that have been readied while the scheduler was suspended. They will be moved to the ready list when the scheduler is resumed. */
pxReadyTasksLists[ configMAX_PRIORITIES ]is a list array,Tasks with the same priority share
the common index in the array.
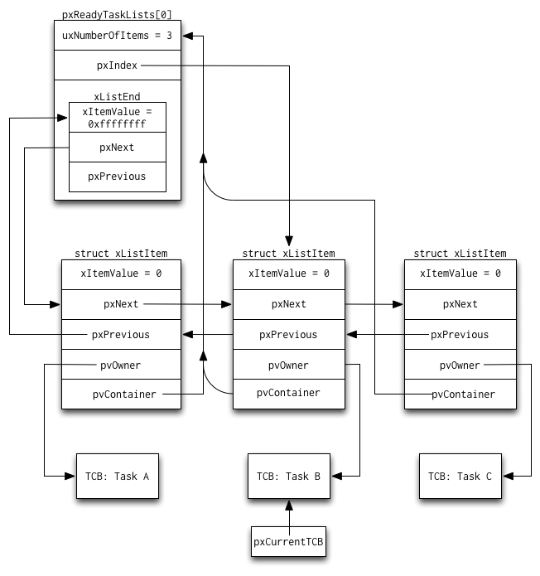
The listItem structure is as following :
struct xLIST_ITEM
{
portTickType xItemValue; /* The value being listed. In most cases
this is used to sort the list in
descending order. */
volatile struct xLIST_ITEM * pxNext; /* Pointer to the next xListItem in the
list. */
volatile struct xLIST_ITEM * pxPrevious; /* Pointer to the previous xListItem in
the list. */
void * pvOwner; /* Pointer to the object (normally a TCB)
that contains the list item. There is
therefore a two-way link between the
object containing the list item and
the list item itself. */
void * pvContainer; /* Pointer to the list in which this list
item is placed (if any). */
};
and list structure:
typedef struct xLIST
{
volatile unsigned portBASE_TYPE uxNumberOfItems;
volatile xListItem * pxIndex; /* Used to walk through the list. Points to
the last item returned by a call to
pvListGetOwnerOfNextEntry (). */
volatile xMiniListItem xListEnd; /* List item that contains the maximum
possible item value, meaning it is always
at the end of the list and is therefore
used as a marker. */
} xList;
the listItem in the list are sorted in high to low sequence, which means the first item is the xListend with the highes value(0xFFFF or 0xffffffff), plays the role of list marker.
Queue
Queue structure:
typedef struct QueueDefinition
{
signed char *pcHead; /* Points to the beginning of the queue
storage area. */
signed char *pcTail; /* Points to the byte at the end of the
queue storage area. One more byte is
allocated than necessary to store the
queue items; this is used as a marker. */
signed char *pcWriteTo; /* Points to the free next place in the
storage area. */
signed char *pcReadFrom; /* Points to the last place that a queued
item was read from. */
xList xTasksWaitingToSend; /* List of tasks that are blocked waiting
to post onto this queue. Stored in
priority order. */
xList xTasksWaitingToReceive; /* List of tasks that are blocked waiting
to read from this queue. Stored in
priority order. */
volatile unsigned portBASE_TYPE uxMessagesWaiting; /* The number of items currently
in the queue. */
unsigned portBASE_TYPE uxLength; /* The length of the queue
defined as the number of
items it will hold, not the
number of bytes. */
unsigned portBASE_TYPE uxItemSize; /* The size of each items that
the queue will hold. */
} xQUEUE;
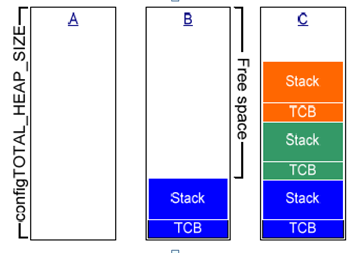
Task Scheduling Process
Note:Task Block and Task stack can be locate in non-continuous memory.
when task is created:
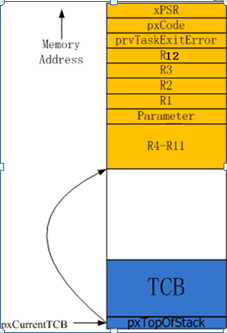
StackType_t *pxPortInitialiseStack( StackType_t *pxTopOfStack, TaskFunction_t pxCode, void *pvParameters )
{
/* Simulate the stack frame as it would be created by a context switch
interrupt. */
pxTopOfStack--; /* Offset added to account for the way the MCU uses the stack on entry/exit of interrupts. */
*pxTopOfStack = portINITIAL_XPSR; /* xPSR */
pxTopOfStack--;
*pxTopOfStack = ( StackType_t ) pxCode; /* PC */
pxTopOfStack--;
*pxTopOfStack = ( StackType_t ) prvTaskExitError; /* LR */
pxTopOfStack -= 5; /* R12, R3, R2 and R1. */
*pxTopOfStack = ( StackType_t ) pvParameters; /* R0 */
pxTopOfStack -= 8; /* R11..R4. */
return pxTopOfStack;
}
when the first task is scheduled: __asm void prvPortStartFirstTask( void ) { extern pxCurrentTCB;
PRESERVE8
/* The MSP stack is not reset as, unlike on M3/4 parts, there is no vector
table offset register that can be used to locate the initial stack value.
Not all M0 parts have the application vector table at address 0. */
ldr r3, =pxCurrentTCB /* Obtain location of pxCurrentTCB. */
ldr r1, [r3]
ldr r0, [r1] /* The first item in pxCurrentTCB is the task top of stack. */
adds r0, #32 /* Discard everything up to r0. */
msr psp, r0 /* This is now the new top of stack to use in the task. */
movs r0, #2 /* Switch to the psp stack. */
msr CONTROL, r0 /* Config `CONTROL` register to PSP & privilege mode*/
pop {r0-r5} /* Pop the registers that are saved automatically. */
mov lr, r5 /* lr is now in r5. */
cpsie i /* The first task has its context and interrupts can be enabled. */
pop {pc} /* Finally, pop the PC to jump to the user defined task code. */
ALIGN
}
task switch process happened in pendsv handler, first restore task1 stack, and switch to task2 stack and pop register of task2:
__asm void xPortPendSVHandler( void )
{
extern vTaskSwitchContext
extern pxCurrentTCB
PRESERVE8
mrs r0, psp
ldr r3, =pxCurrentTCB /* Get the location of the current TCB. */
ldr r2, [r3]
subs r0, #32 /* Make space for the remaining low registers. */
str r0, [r2] /* Save the new top of stack. */
stmia r0!, {r4-r7} /* Store the low registers that are not saved automatically. */
mov r4, r8 /* Store the high registers. */
mov r5, r9
mov r6, r10
mov r7, r11
stmia r0!, {r4-r7}
push {r3, r14}
cpsid i
bl vTaskSwitchContext
cpsie i
pop {r2, r3} /* lr goes in r3. r2 now holds tcb pointer. */
ldr r1, [r2]
ldr r0, [r1] /* The first item in pxCurrentTCB is the task top of stack. */
adds r0, #16 /* Move to the high registers. */
ldmia r0!, {r4-r7} /* Pop the high registers. */
mov r8, r4
mov r9, r5
mov r10, r6
mov r11, r7
msr psp, r0 /* Remember the new top of stack for the task. */
subs r0, #32 /* Go back for the low registers that are not automatically restored. */
ldmia r0!, {r4-r7} /* Pop low registers. */
bx r3
ALIGN
}